Descrição
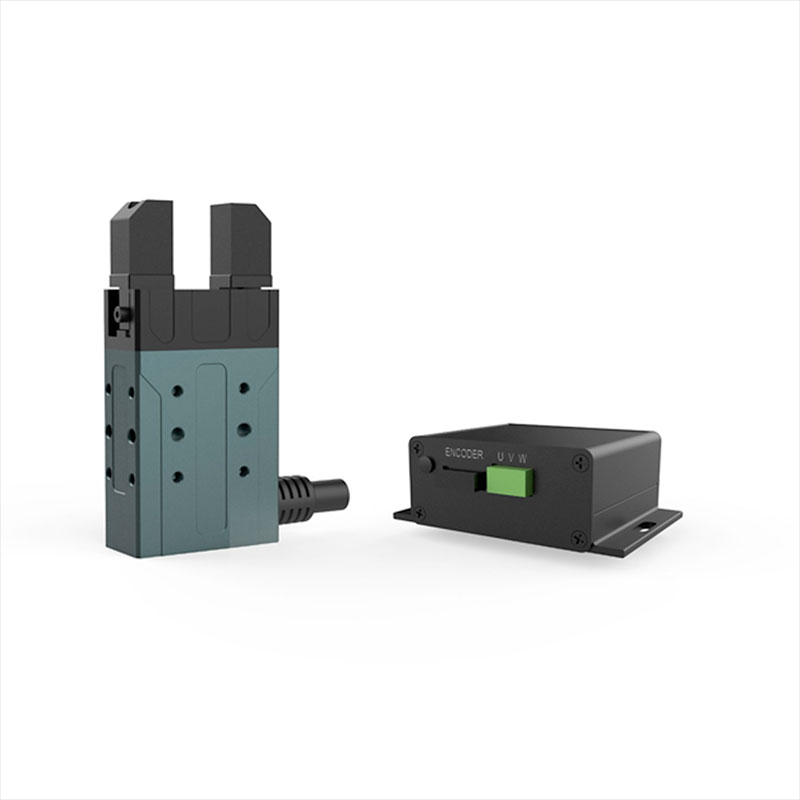
Esta garra elétrica (Tipo Servo) foi concebida para aplicações avançadas. Está equipada com um par de pontas de dedos paralelas, que corre simetricamente durante o movimento. A estrutura principal da garra é uma estrutura retangular lisa.
Força/posição/velocidade controláveis: A garra pode programar e ajustar a posição de aderência, força de aderência e velocidade.
Múltiplos modos de comunicação: A garra suporta o protocolo Modbus RTU e o controlo do modo IO. Outros protocolos de comunicação tais como USB e ETHERNET podem ser transferidos através de um conversor de protocolos.
Deteção de recolha: A combinação de controlo de força e controlo de posição é adotada no processo de agarrar.
Feedback: O estado da garra pode ser lido por programação, e também pode ser julgado de acordo com o indicador da garra.
As pontas dos dedos podem ser personalizadas: As pontas dos dedos podem ser substituídas de acordo com a situação, o que é adequado para maquinagem de precisão, montagem de peças, e outros campos.
Características:
- Elevada força de preensão (até 2N para cada lado);
- Controlo mais fino sobre a forças e velocidade de preensão;
- A distância de preensão é ajustável para afinar de acordo com o tamanho das peças de trabalho.







Avaliações
Ainda não existem avaliações.